W tym odcinku zajmiemy siê teoretycznḟ stronḟ ġuków ryb na wy¶wietlaczu echosondy. Jak powstajḟ i dlaczego wġa¶ciwie majḟ tak specyficzny ksztaġt. Drugi temat to porównanie czujników echosond: dlaczego identyczne transduktory mogḟ mieæ róṡne kḟty stoṡka i co z tego wynika w praktyce.
15 lat temu, gdy zaczynaġem swojḟ przygodê z echosondḟ marzyġy mi siê grube ġuki ryb, zwiastujḟce olbrzymie szczupaki, okonie i sandacze. W folderach reklamujḟcych ówczesne echosondy takie obrazy oferowaġy modele, które niestety byġy poza moim zasiêgiem finansowym. Potem byġa pierwsza echosonda i bardzo szybko przekonaġem siê, ṡe urzḟdzenie, które kupili¶my wspólnie z przyjacielem nie jest w stanie pokazaæ ġuków. (Teraz wiem, ṡe tak naprawdê nasza wiedza o obrazach sonarowych byġa niewystarczajḟca). Dopiero kilka lat póỳniej na ekranie nowego echa - zupeġnie bez trudu - zaczêli¶my dostrzegaæ upragnione ġuczki.
No wġa¶nie: dlaczego echa przybierajḟ takie wġa¶nie ksztaġty. Postaram siê to wyja¶niæ na rysunku poniṡej.
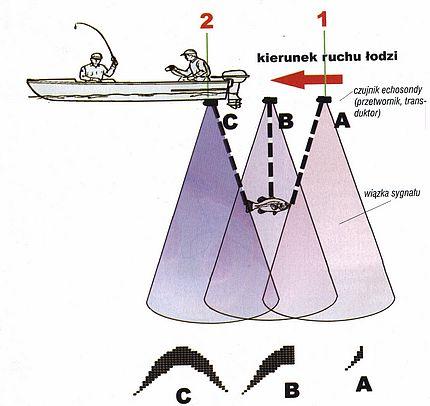
Powstawanie echa ryby na ekranie echosondy.
Rysunek pokazuje ġódkê z echosondḟ na pokġadzie. £ódỳ porusza siê od prawej do lewej. Sonar wysyġa wiḟzkê sygnaġu, która odbija siê od ryby i wraca do przetwornika. Na rysunku pokazane sḟ trzy najwaṡniejsze poġoṡenia stoṡka i ryby. W rzeczywisto¶ci ultradỳwiêkowych pingów na odcinku miêdzy punktem 1 i 2 moṡe byæ nawet kilkana¶cie.
Jak juṡ wiemy z poprzednich odcinków tego cyklu (patrz: "Pierwsza echosonda") echosonda pokazuje na ekranie odlegġo¶æ od przetwornika do obiektu w wodzie. Kiedy wiḟzka zbliṡa siê do ryby i zaczyna siê z niḟ stykaæ sygnaġ zwrotny jest jeszcze bardzo sġaby (stoṡek A). Dlatego poczḟtek ġuku jest reprezentowany tylko przez wḟski ġuk, skġadajḟcy siê z kilku pikseli. W miarê zbliṡania siê do ryby sygnaġ odbity powraca z coraz to mniejszej odlegġo¶ci i jest coraz mocniejszy. W momencie, kiedy ġódka przepġywa bezpo¶rednio nad rybḟ odlegġo¶æ do niej jest najmniejsza i jednocze¶nie sygnaġ od niej odbity jest najmocniejszy - to dlatego ¶rodek ġuku jest najszerszy (stoṡek B). Teraz nastêpuje faza odpġywania od ryby i ġuk ponownie robi siê coraz cieñszy (stoṡek C). Jak zauwaṡyli¶cie na skutek zmian w odlegġo¶ci ryby od przetwornika tworzy siê charakterystyczny ġuk. O wielko¶ci ryby ¶wiadczy nie jego dġugo¶æ, ale grubo¶æ, która jest bezpo¶rednio zwiḟzana z siġḟ odbitego sygnaġu, a przez to z wielko¶ciḟ ryby.
To, co jest pokazane na rysunku to sytuacja teoretyczna. W rzeczywisto¶ci bardzo czêsto nie najedziemy na rybê centralnie. W zwiḟzku z tym moṡe siê wydawaæ, ṡe jest ona mniejsza niṡ w rzeczywisto¶ci. Pamiêtajmy o tym, je¶li mamy wḟtpliwo¶ci powinni¶my zrobiæ kilka napġyniêæ, aby dobrze spenetrowaæ potencjalne ġowisko.
Jak mierzy siê kḟt stoṡka sygnaġu przetwornika?
Stoṡek sygnaġu nie jest dosġownie stoṡkiem - to tylko pewne umowne pojecie. W rzeczywisto¶ci wyglḟda on jak na rysunku poniṡej.
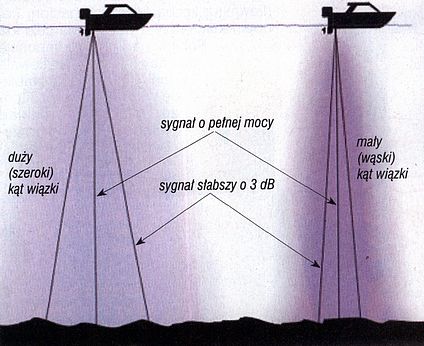
Stoṡki sygnaġów o róṡnych kḟtach.
Wiêkszo¶æ producentów mierzy tê warto¶æ w nastêpujḟcy sposób.
Bada siġê sygnaġu w centrum, a nastêpnie odsuwajḟc miernik coraz dalej od ¶rodka znajduje miejsce, gdzie sygnaġ jest o -3 dB sġabszy niṡ w ¶rodku. W ludzkim jêzyku jest to miejsce, gdzie moc sygnaġu sġabnie o 50%. Na tej podstawie oblicza kḟt stoṡka.
Sḟ jednak producenci, którzy jako odniesienie przyjmujḟ -10 dB (spadek mocy sygnaġu o 90%). To taki komercyjny zabieg - wêdkarzom wydaje siê, ṡe im szerszy stoṡek, tym lepiej obserwuje siê podwodnḟ rzeczywisto¶æ - niestety nie zawsze tak bywa.
Stosowanie róṡnych norm powoduje sytuacjê, w której taki sam czujnik moṡe mieæ trzy razy wiêkszy kḟt stoṡka sygnaġu. Tak wiêc metoda pomiaru moṡe mieæ podstawowe znaczenie przy warto¶ciach podanego kḟta. Eagle i Lowrance stosujḟ pomiar oparty na standardzie -3 dB, ale stosujḟ teṡ pojêcie stoṡka efektywnego ( norma -10 dB). W Humminbirdzie. jest to standardowo norma -10 dB.
Szeroki i wḟski kḟt w praktyce.
Czujnik echosondy peġni podwójnḟ rolê. W momencie wysyġania sygnaġu jest gġo¶nikiem, potem zamienia siê w czuġy mikrofon, odbierajḟcy odbite sygnaġy.
Jak wiadomo mikrofony majḟ roṡnḟ charakterystykê. Sḟ takie, którymi moṡna zarejestrowaæ dỳwiêki z duṡej odlegġo¶ci, ale trzeba je bardzo dokġadnie nakierowaæ na ỳródġo dỳwiêku oraz takie, które zbierajḟ wszystkie dỳwiêki dookoġa.
Wyobraỳmy sobie sytuacjê, kiedy w zatġoczonym pokoju chcemy nagraæ rozmowê z jednḟ osobḟ. Majḟc zwykġy mikrofon zarejestrujemy caġy zgieġk tġumu, dysponujḟc mikrofonem o wġa¶ciwej charakterystyce nagramy tylko to, na czym nam zaleṡy. Jak to przeġoṡyæ na podwodne realia?
Szeroki kḟt stoṡka sygnaġu (np. 90 stopni) powinien teoretycznie pozwoliæ na wykrycie ryb w wiêkszej objêto¶ci toni wodnej i tak jest w rzeczywisto¶ci. Naleṡy tylko pamiêtaæ, ṡe ġḟcznie z sygnaġem dna i ryb, dostajemy równieṡ echa odbite od wszystkiego, co siê w wodzi znajduje: planktonu, ro¶linno¶ci, itd. Je¶li jest tego duṡo, to echosonda zacznie nam wariowaæ i obraz zrobi siê maġo klarowny.
Miaġem takie sytuacje nawet ze standardowym 20 stopniowym czujnikiem, kiedy pġywali¶my nad zbitḟ ġawicḟ pġoci, przemieszczajḟcḟ siê na kilku metrach pod powierzchniḟ. Echosonda zaczêġa pokazywaæ 4 metry do dna, gdy tymczasem stali¶my na dobrych 10 m. Sygnaġ nie byġ w stanie przebiæ siê przez ryby i dotrzeæ do gruntu.
Ciekawe róṡnice wystêpujḟ w sposobie obrazowania dna przez przetworniki szerokokḟtne i wḟskokḟtne. Rysunek poniṡej pokazuje, ṡe zdecydowanie dokġadniej pokazuje topografiê dna przetwornik wḟsokḟtny .Szeroki kḟt przetwornika powoduje nieuchronne spġaszczenie obrazu, ale za to rzeczywi¶cie uġatwia poszukiwanie ġawic ryb w toni wodnej.
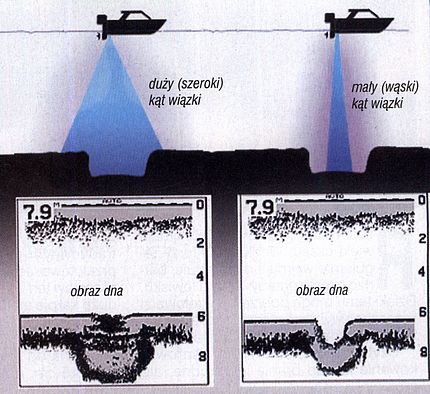
Porównanie obrazów dna z czujnika szeroko- i wḟskokḟtnego.
Cezary Karpiñski
"ThinkBig Polska"
Tekst ukazaġ siê w numerze 08/2005 "Wêdkarskiego Ḋwiata".